Portfolio
3 engineering projects I'm proud of

This post will act as a portfolio, so let me share three of my favorite projects:
Pintobotics: robotic squirrel
SATYRR: teleoperated wheeled humanoid
Illini Voyager: high-altitude remote sensing
I don’t update this post very often, so check out the links to the project pages!

Pintobotics
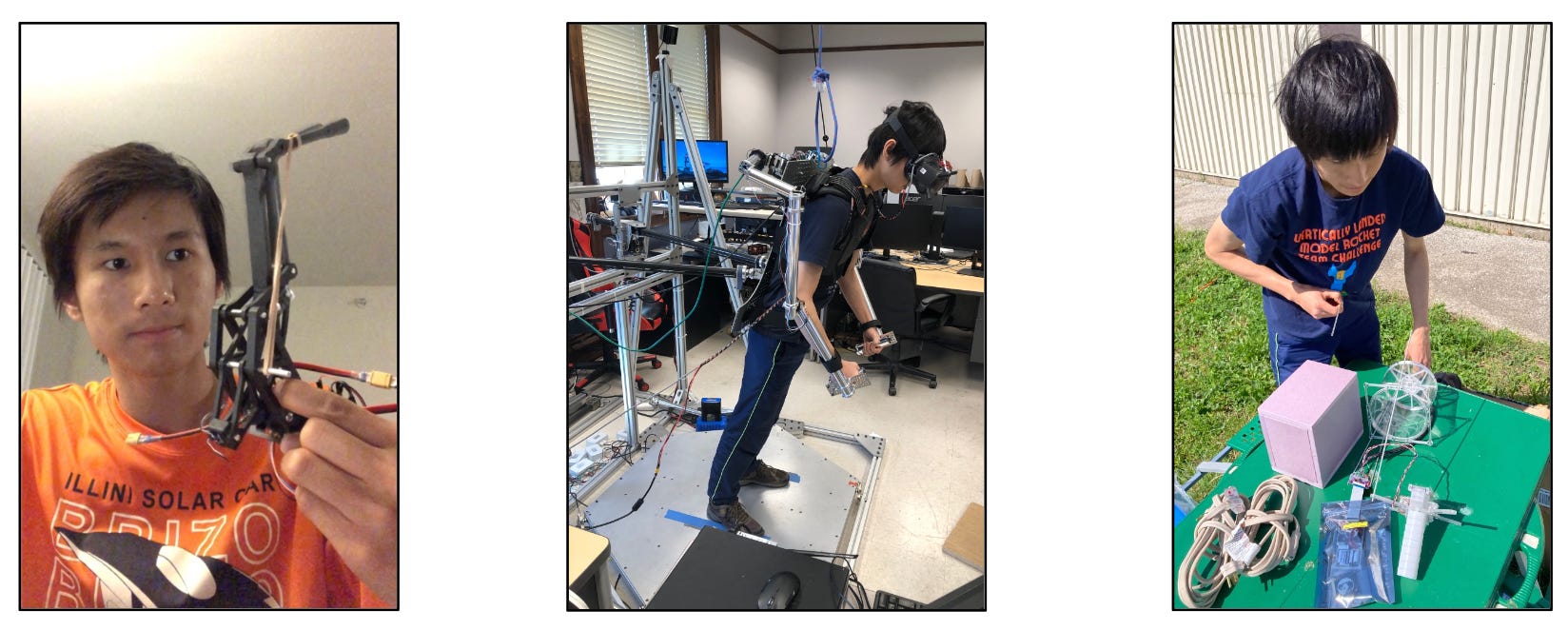
Pintobotics is my multi-year project to develop a realistic robotic squirrel from scratch, and I took a semester off during Fall 2023 to focus on it full time. Collaborating with a mechanical engineering student at UIUC, we aim to replicate squirrels’ agile jumping and tree climbing abilities using optimized mechanical design and custom power electronics.

Paper: Pinto: A latched spring actuated robot for jumping and perching (ICRA 2025)
Biweekly newsletter: pintobotics.substack.com
Youtube channel: youtube.com/@Pintobotics
Pintobotics: Ø32controller
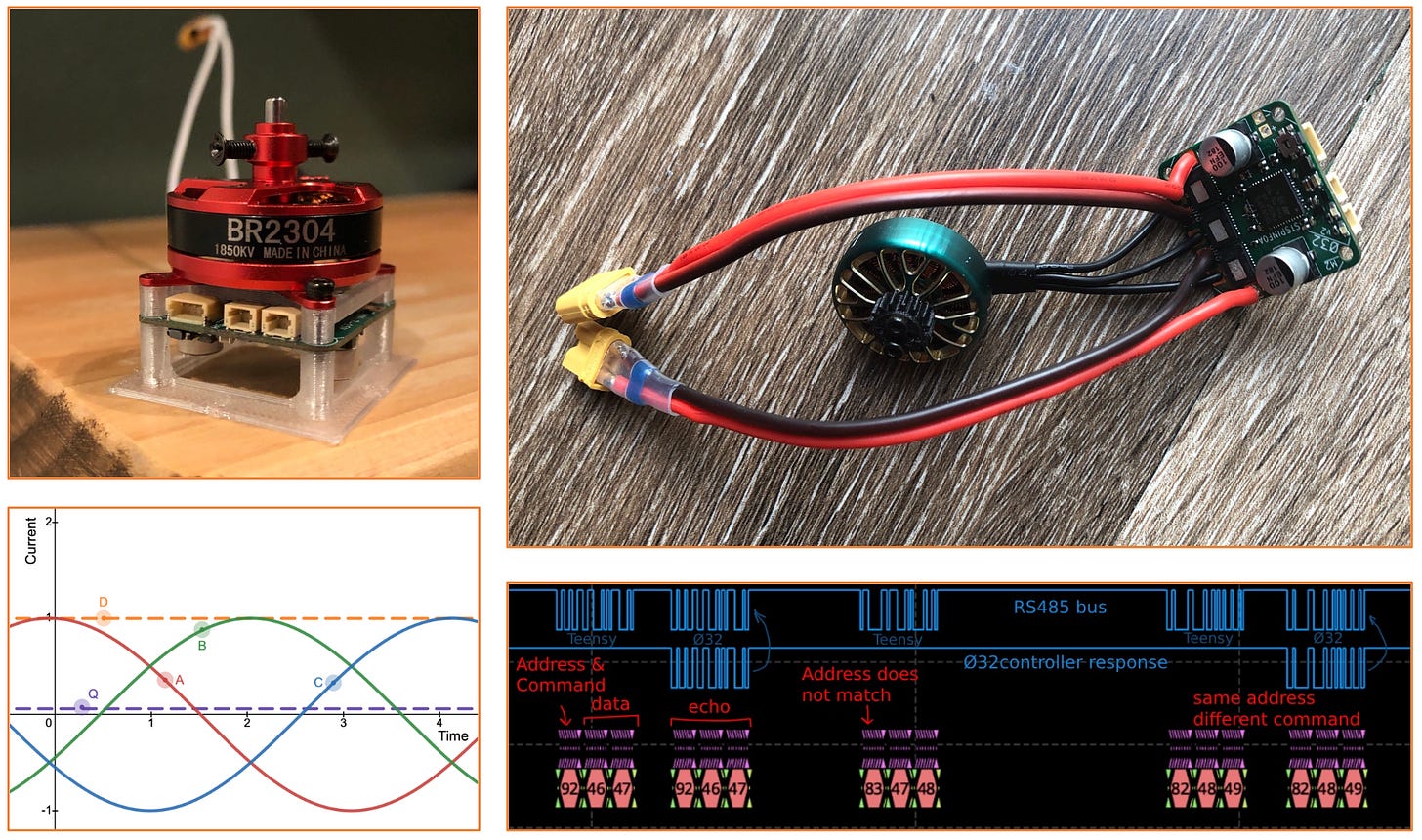
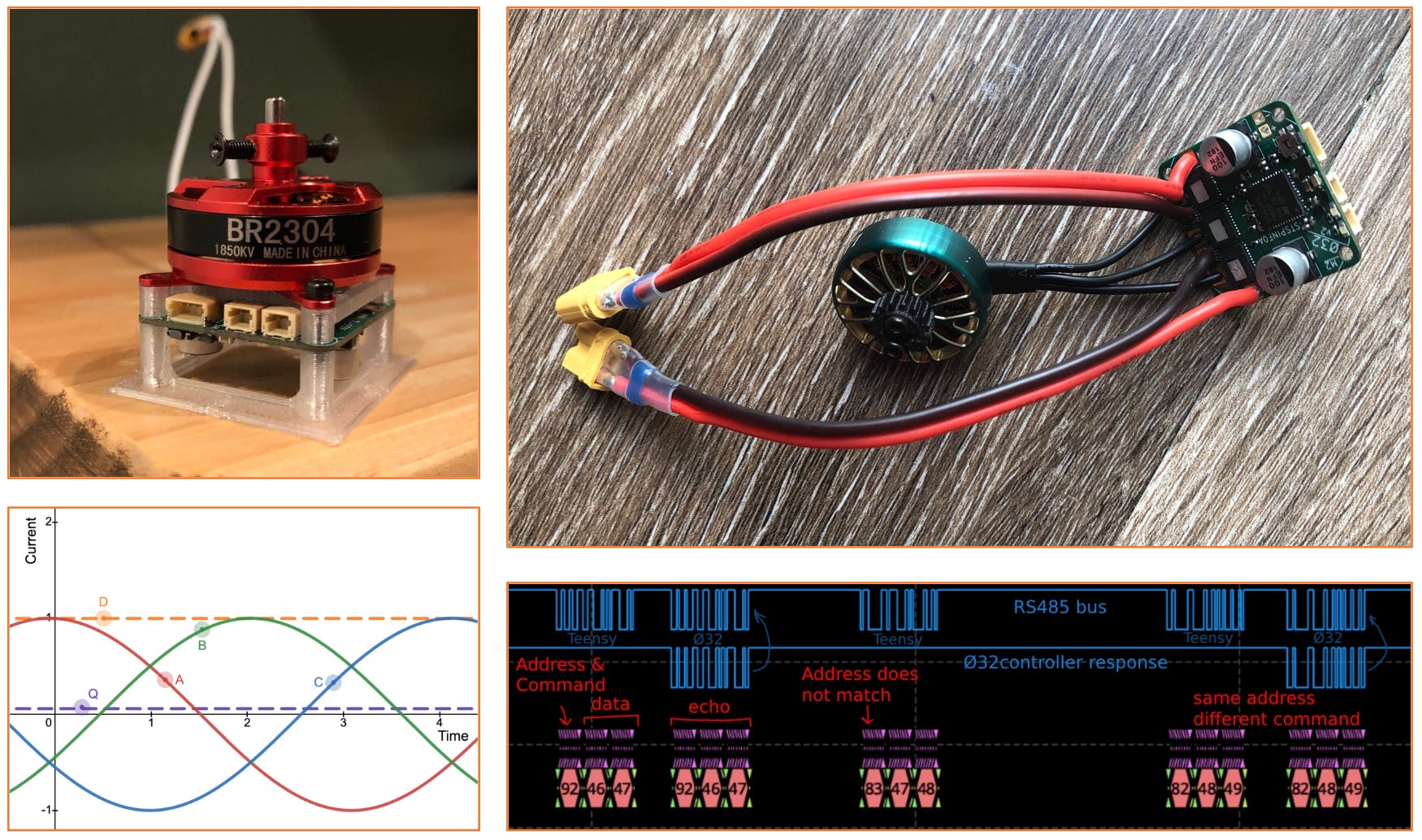
The Ø32controller is a miniature brushless DC motor driver and controller I developed for the robotic squirrel, smaller than similar off-the-shelf devices. I’m currently on hardware revision 3:
50A continuous/110A peak phase current at 7-15V given adequate
heatsinking
Stator coil temperature sensing using an NTC thermistor
Voltage, current, velocity, or position control using a fixed-point
implementation of field-oriented control (FOC)
3-shunt current sensing and 12-bit angle sensing
RS485 bus supports daisy chaining multiple devices
In the process, I gained experience in PCB design, brushless motor control, and serial communication
Open-source hardware and firmware:
Pintobotics: SerpentSerialTool
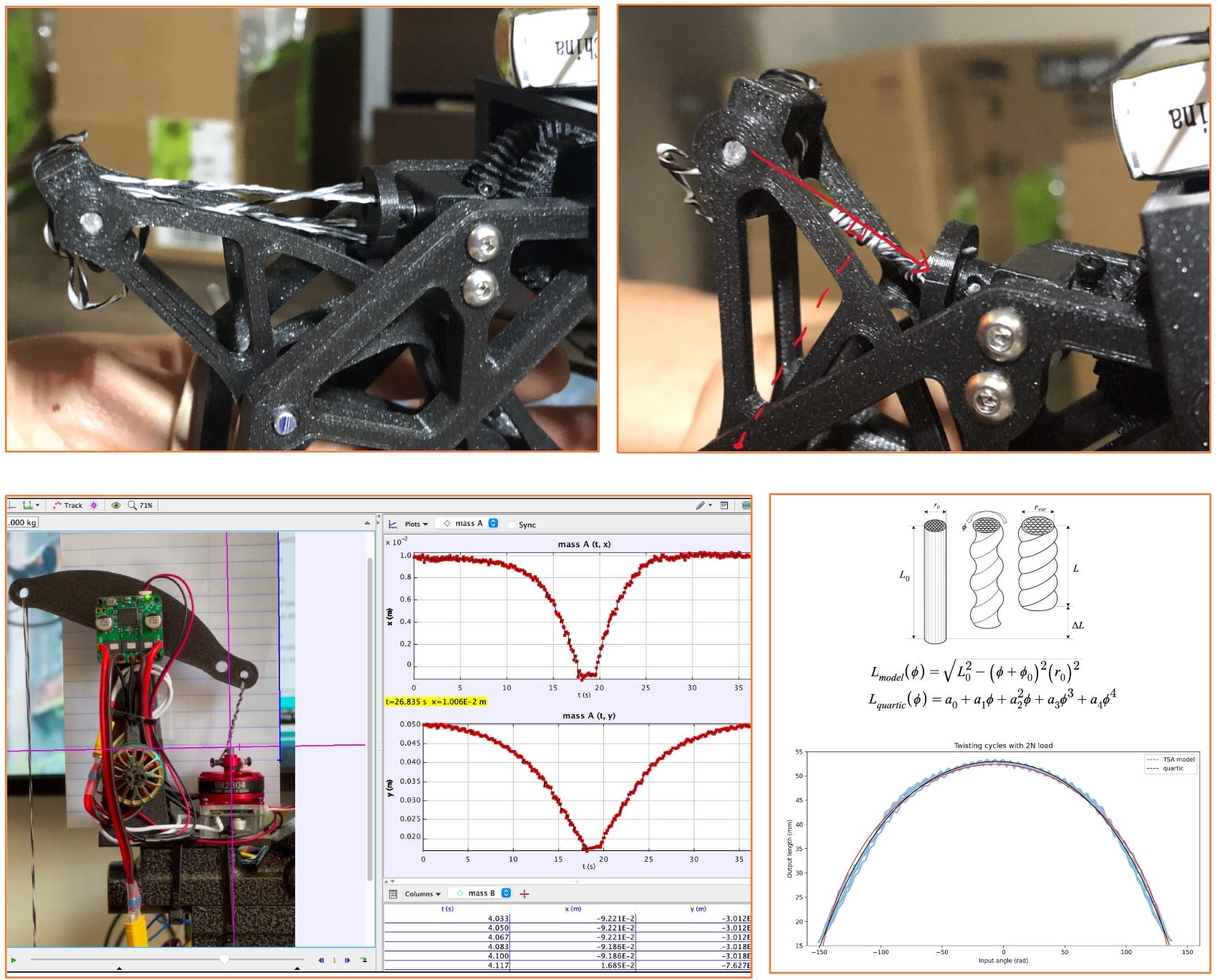
SerpentSerialTool is a cross-platform app I created with python tkinter to log and plot serial data. It is useful for debugging time series data and control responses from microcontrollers, like the commutation of my custom motor driver. I also use this tool to collect data during mechanism testing by connecting force sensors and rotary encoders.
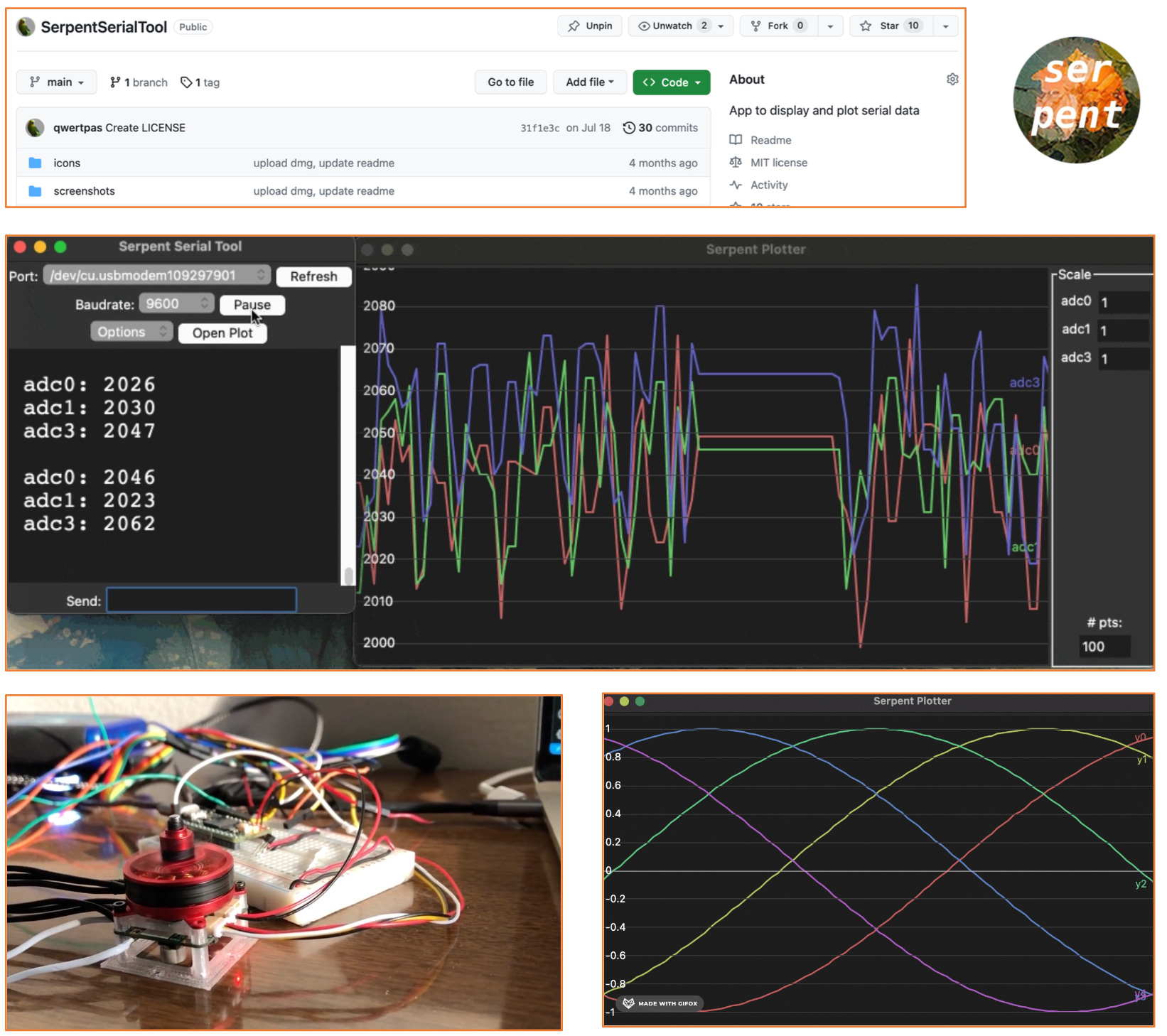
Open-source software: hackaday.io/project/191983-serpent-serial-tool
Pintobotics: Jumping leg
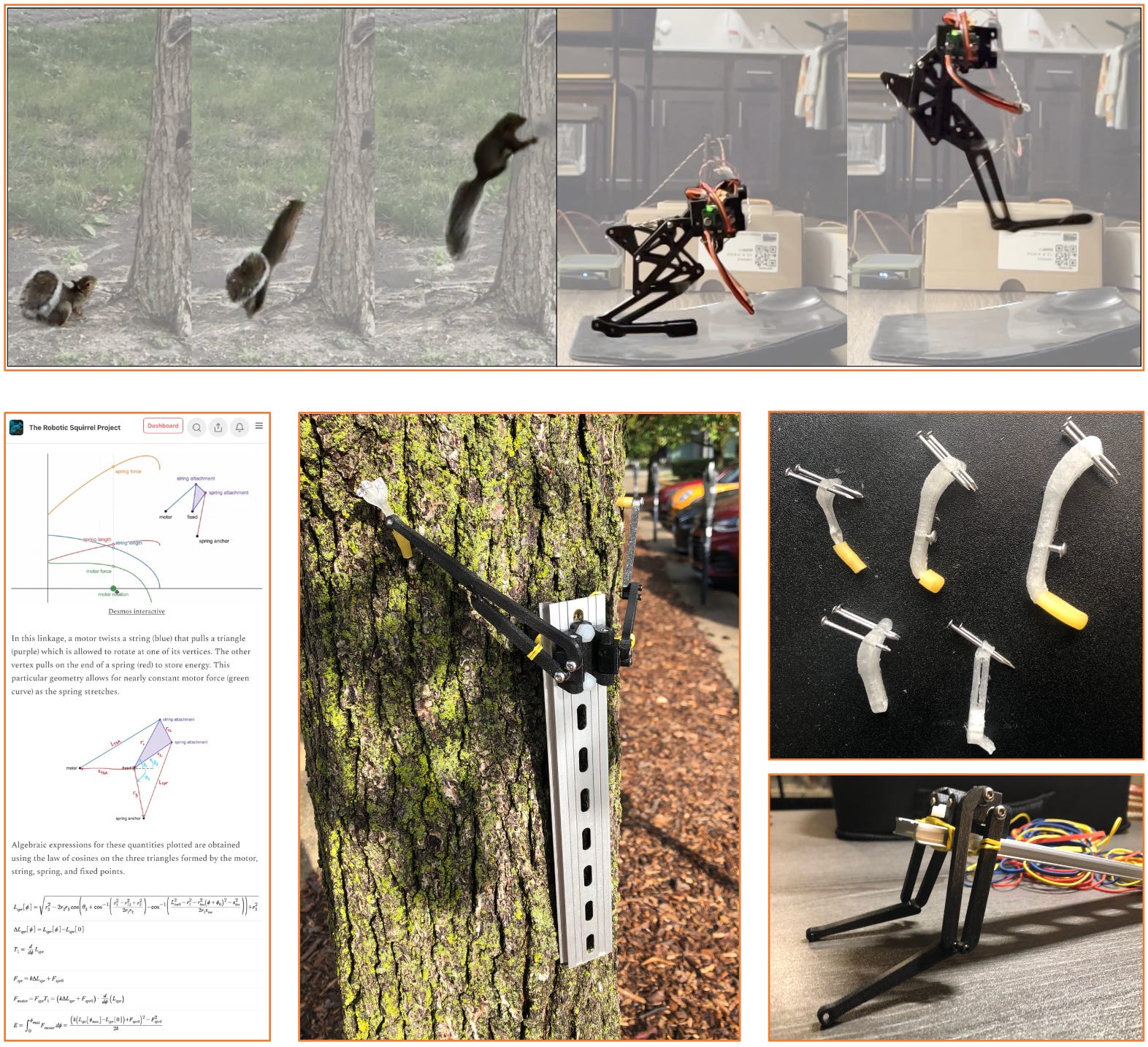
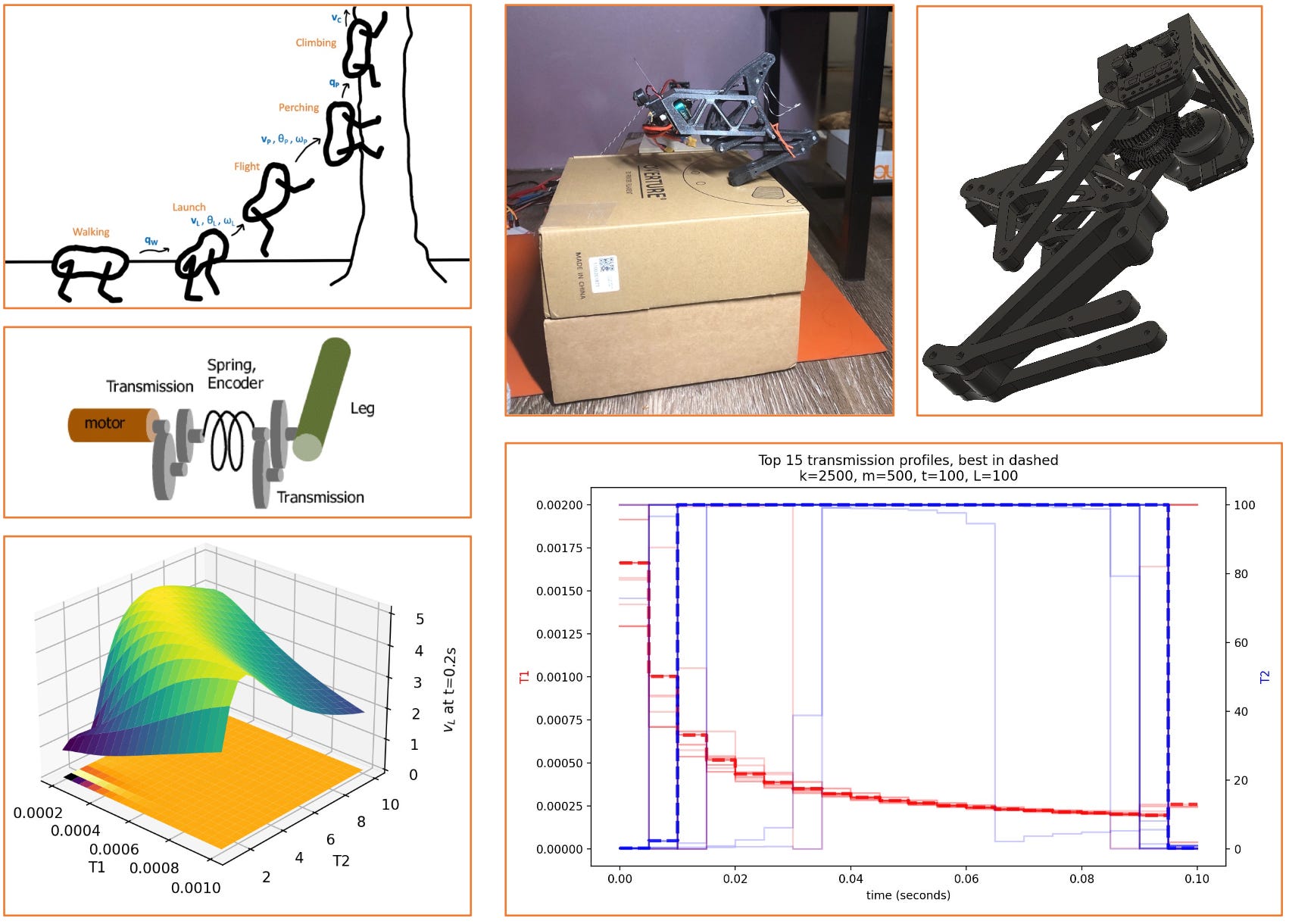
The robot squirrel should be able to jump a significant height up a tree from the ground and eventually maneuver between sparse branches, so I have been developing a powerful rear leg. I derived an analytical solution for a variable mechanical advantage series-elastic actuator and used the CasADi nonlinear optimization tool to find best mechanical advantage profiles within hardware constraints. This allows the instantaneous leg power to exceed direct-drive motor power limits. A unique latch mechanism allows it to switch between a series-elastic and a parallel-elastic mode, which means it can do both continuous motion and wind up energy for a powerful jump.
Technical writings about leg optimization:
pintobotics.substack.com/p/9-three-in-one-newsletter
Pintobotics: Twisted string
The robot squirrel uses small brushless motors that spin at thousands of rotations per minute. To slow them down and increase torque, we integrate a twisted string to convert high speed rotation into slower but higher force contractions, like muscles. However, it has a nonlinear transmission ratio, so I performed tests on various string types, lengths, and radii to characterize twisted strings for our application.
Blog post about the experiments:
pintobotics.substack.com/i/137821874/twisted-string-experiment

SATYRR
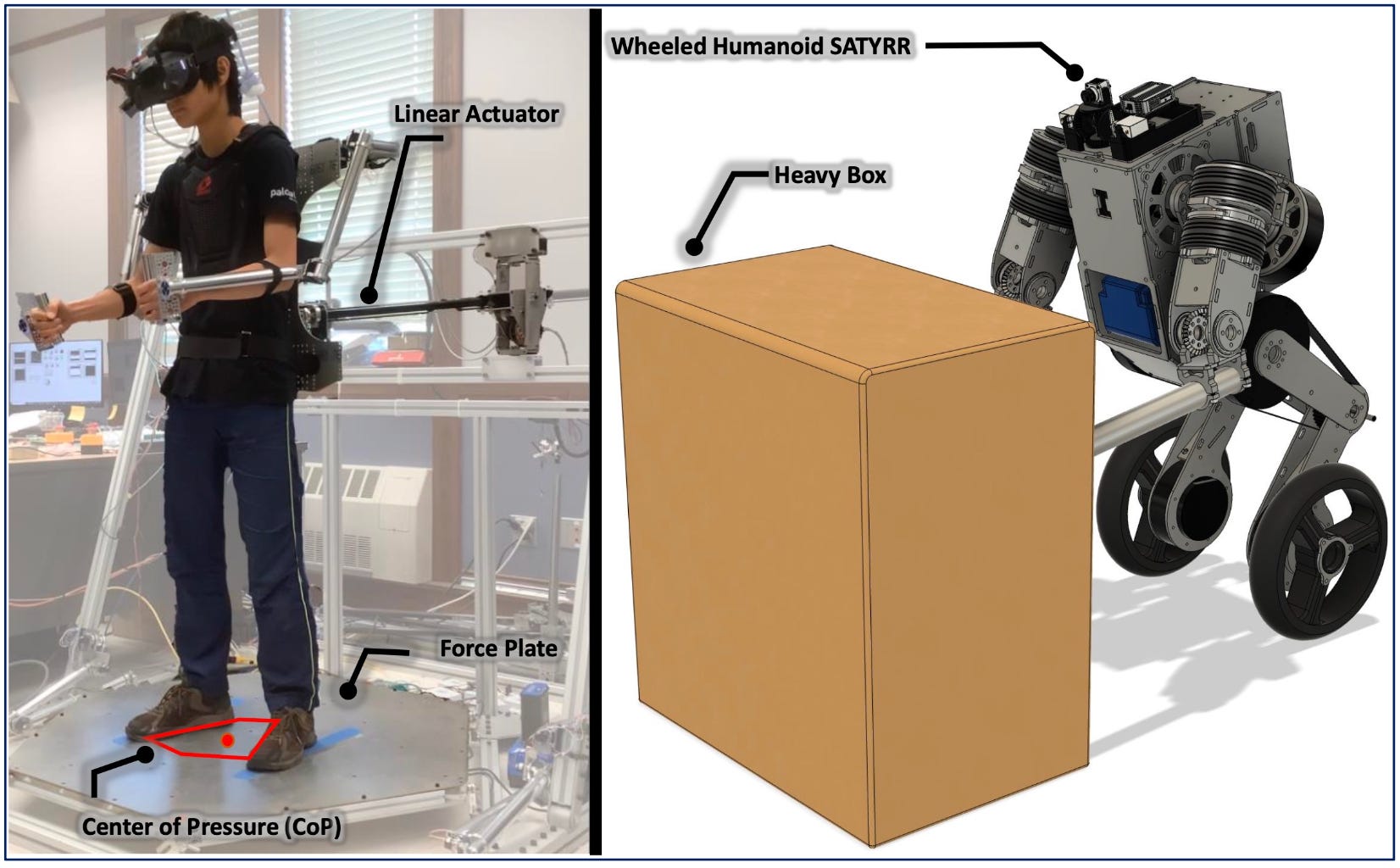
As an undergraduate researcher in the UIUC RoboDesign Lab, I work on SATYRR (Semi-Anthropomorphic Teleoperated Dynamic Rolling Robot) along with PhD student Marty Purushottam. In addition to being the main pilot for the teleoperation experiments, I developed:
Arm mapping for teleoperation (kinematic retargeting)
Compensators for balancing during changing dynamics
Passive gripper
Headtracking unit
Kalman filter for stabilization
Publications:
Dynamic Mobile Manipulation via Whole-Body Bilateral Teleoperation of a Wheeled Humanoid (IEEE Robotics and Automation Letters)
Wheeled Humanoid Bilateral Teleoperation with Position-Force Control Modes for Dynamic Loco-Manipulation (IEEE Humanoids Conference 2024)
Heavy lifting tasks via haptic teleoperation of a wheeled humanoid (IEEE Humanoids Conference 2025)
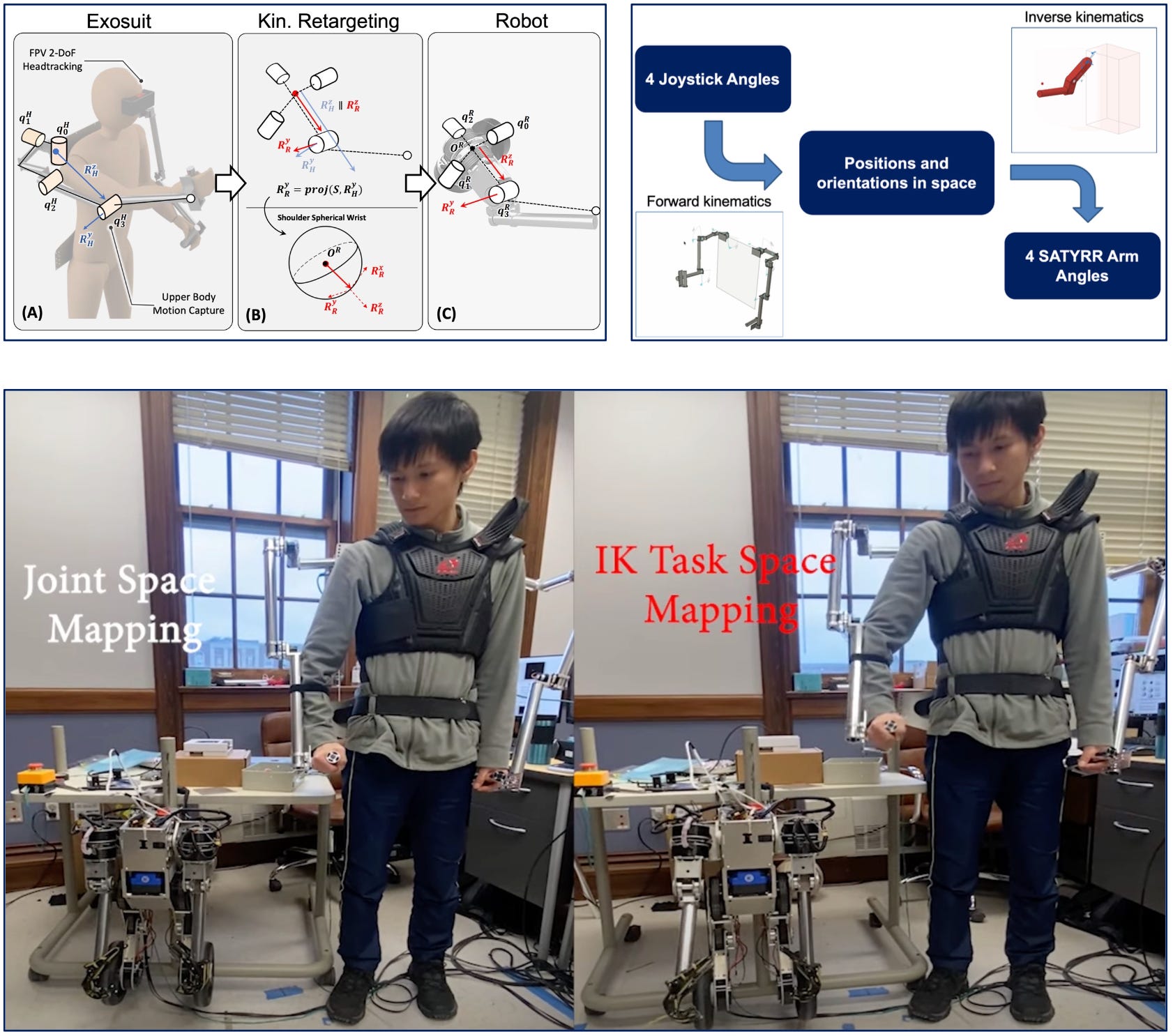
SATYRR: Arm Mapping
We use an exosuit to capture the motion of the human pilot to teleoperate SATYRR’s upper body. However, directly mapping the exosuit joint angles to the robot joint angles does not result in intuitive control due to differences in link lengths and joint orientation. My main contribution to the recent paper is a mapping between the human and the robot by aligning them as close as possible in task space using forward kinematics of the human and inverse kinematics of the robot. Video demo
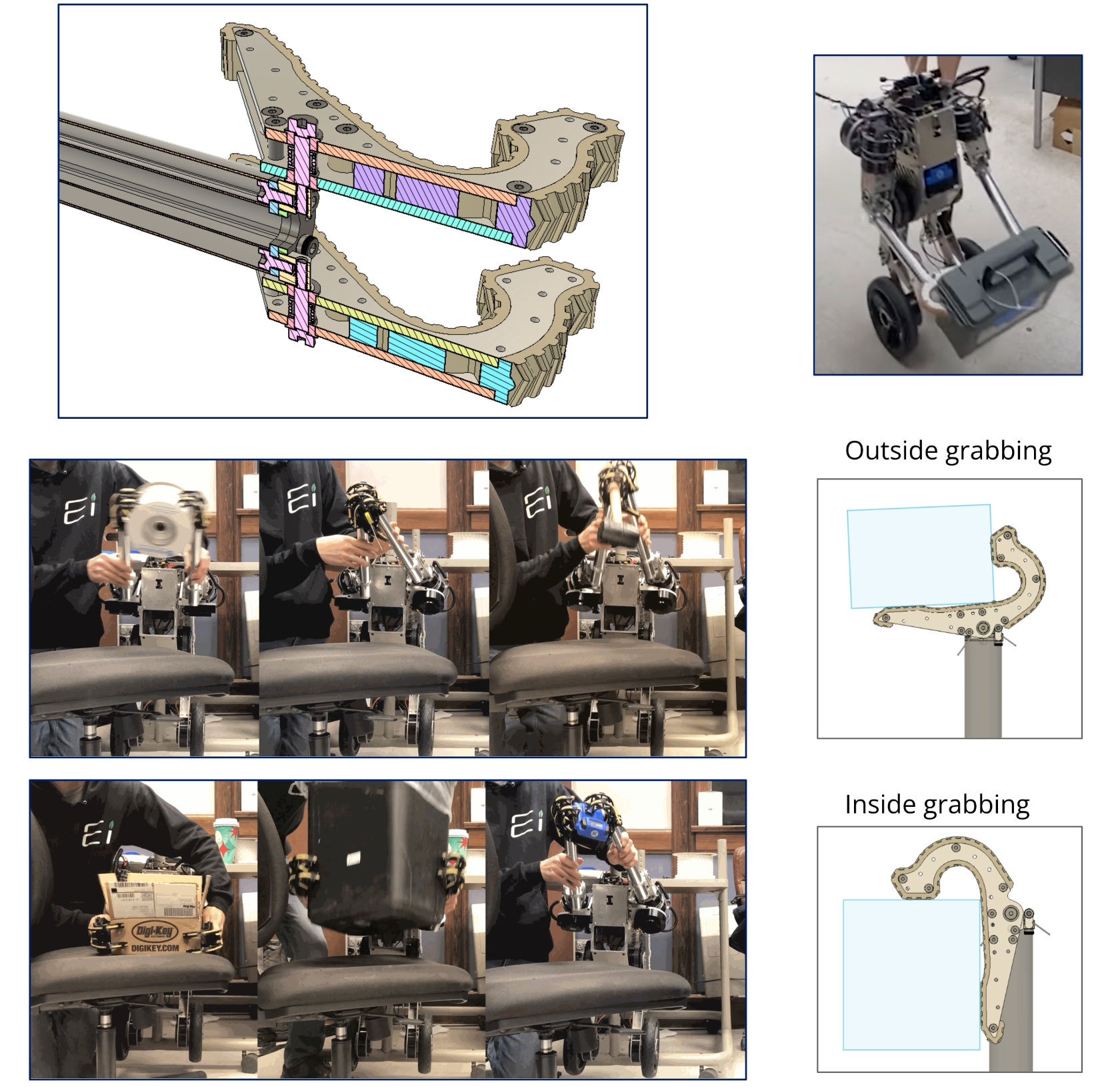
SATYRR: Passive Gripper
The passive gripper allows SATYRR to grasp circular and rectangular objects of various sizes without any actuation. Each finger is independently sprung and lined with a casted flexible polyurethane tread to provide compliance and grip.
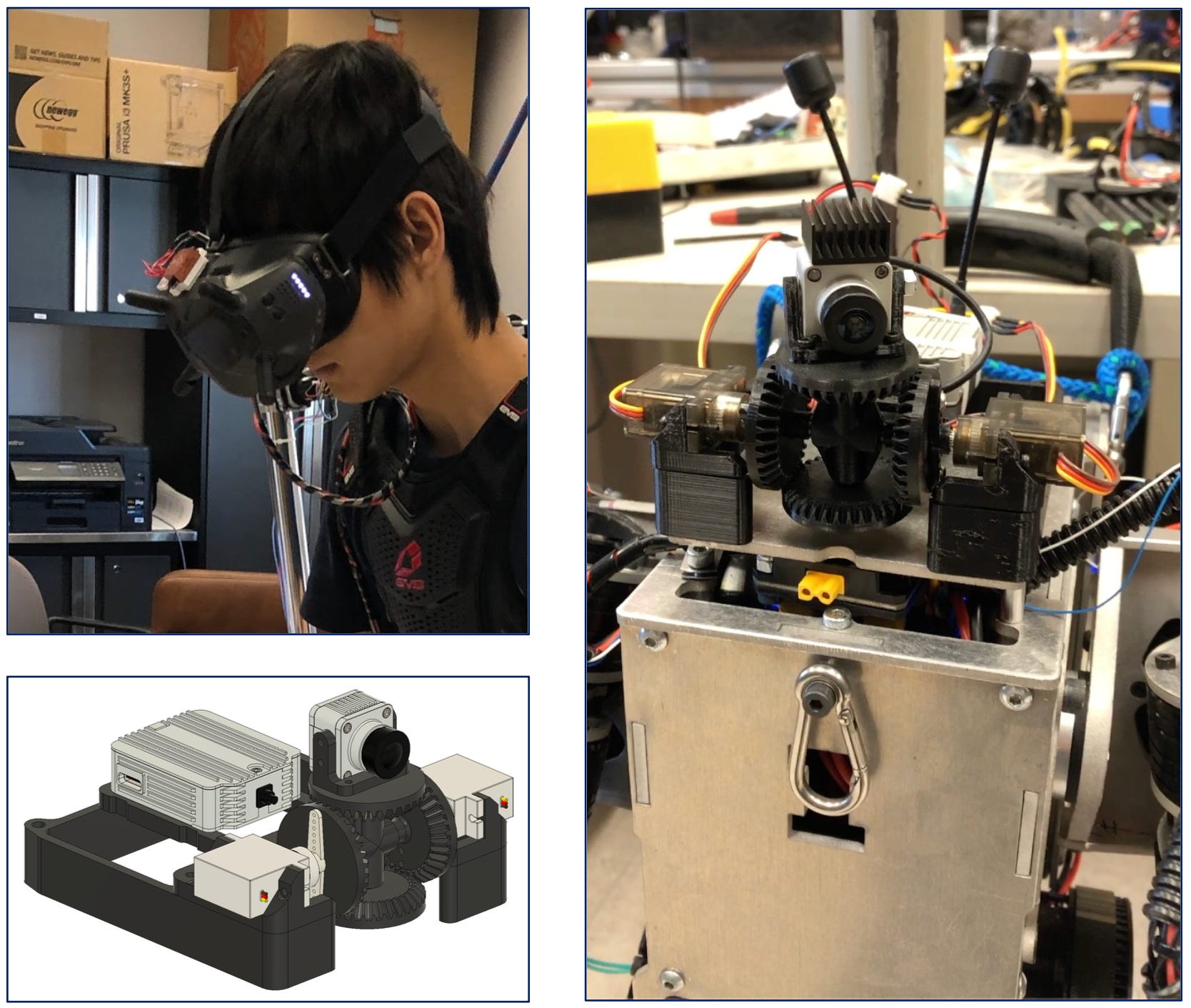
SATYRR: Headtracking Unit
The headtracking unit allows the human pilot to adjust their first- person view (FPV) from the robot by turning their head. An IMU is mounted on the FPV headset to record the yaw and pitch of the pilot’s head. On the robot, two servos in a differential configuration track the human yaw and pitch so the FPV video feed feels natural.
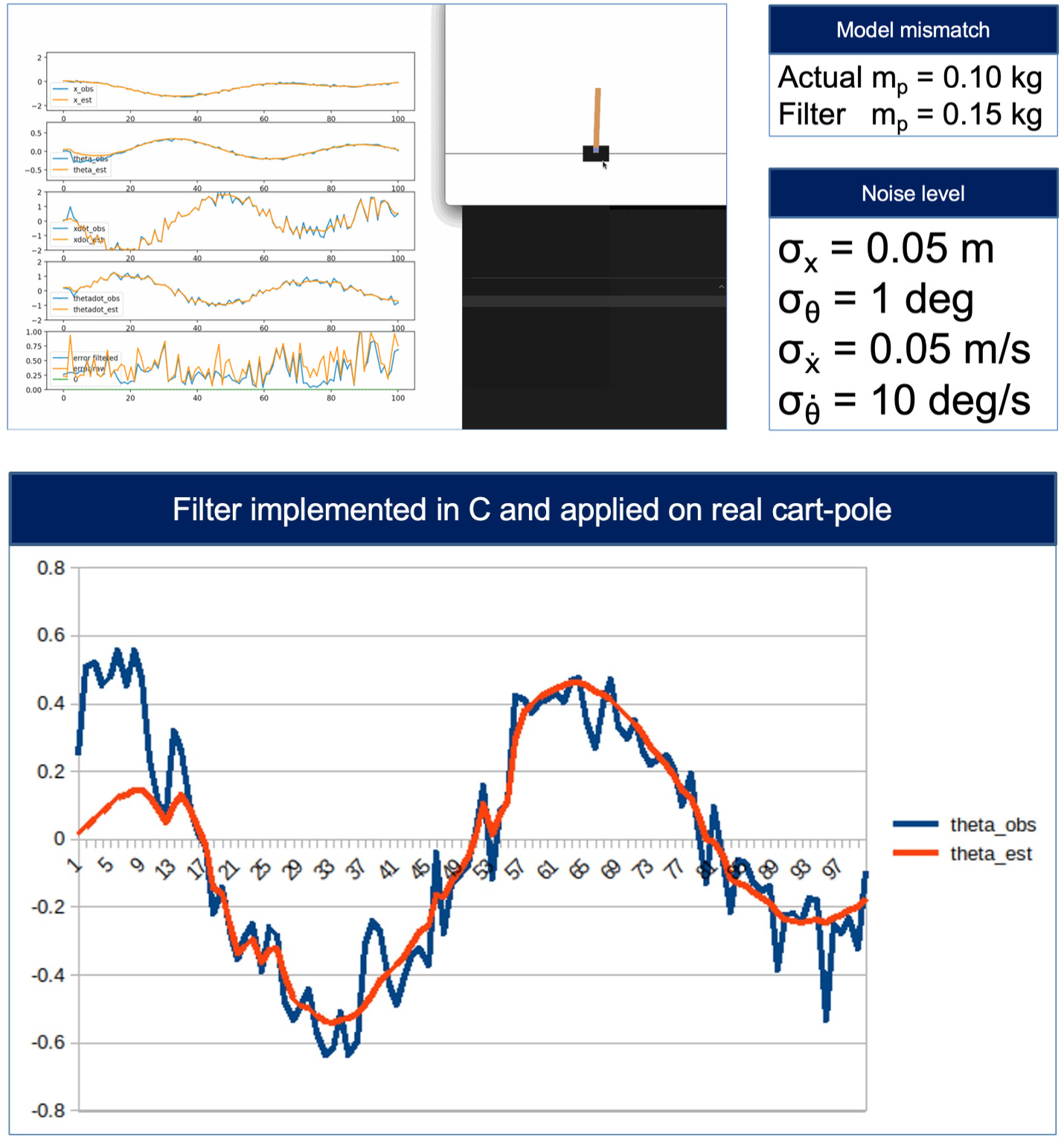
SATYRR: Kalman Filter
SATYRR currently uses an LQR assuming a wheeled inverted pendulum model to stabilize in the sagittal plane. IMU and encoder measurements of pitch and pitch velocity are noisy, so I developed a Kalman filter to provide smoother state estimation. It was first tested in a cart-pole simulation, then on hardware with a real cart-pole.

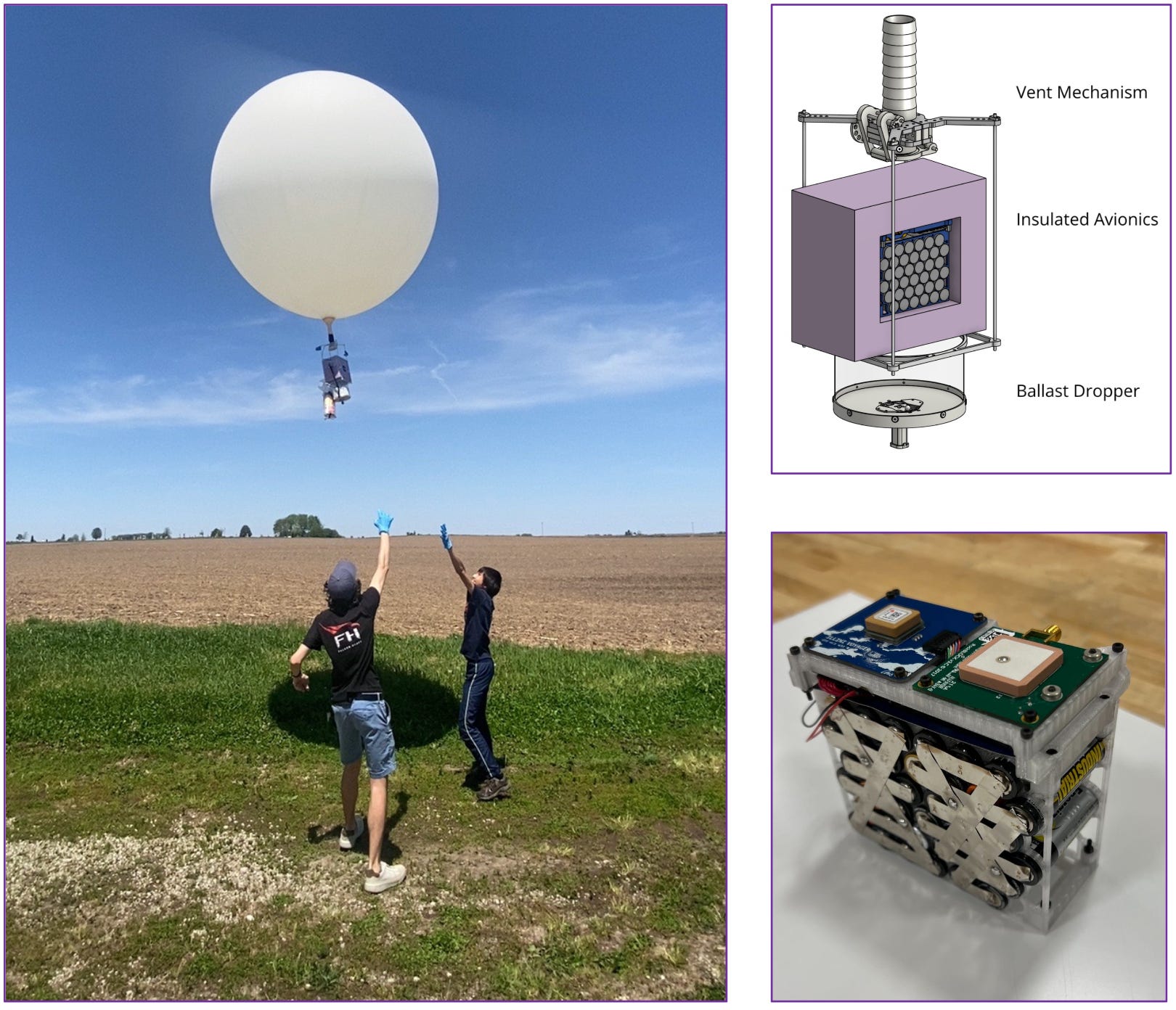
Illini Voyager

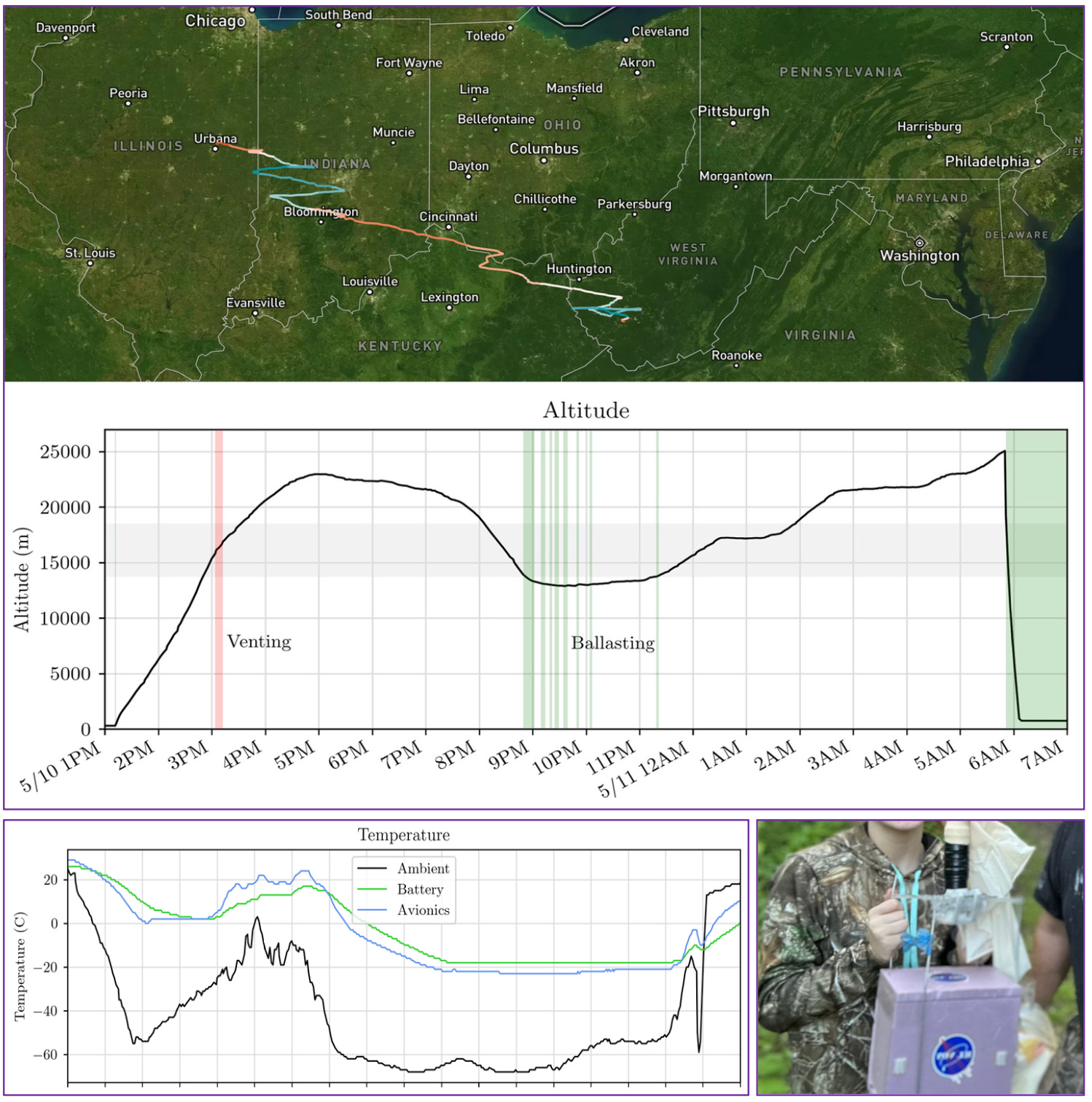
Illini Voyager (ILLVOY) is an ECE senior design project between Cameron Jones and I, winning the Spring 2023 Best Overall Project Award. Weather balloons launched daily by the National Weather Service typically last 2-3 hours before popping at high altitude and are rarely retrieved. Our balloon uses an automated venting and ballast system that allows for remote sensing with much longer range and therefore less pollution.
University news article: ece.illinois.edu/newsroom/news/56604
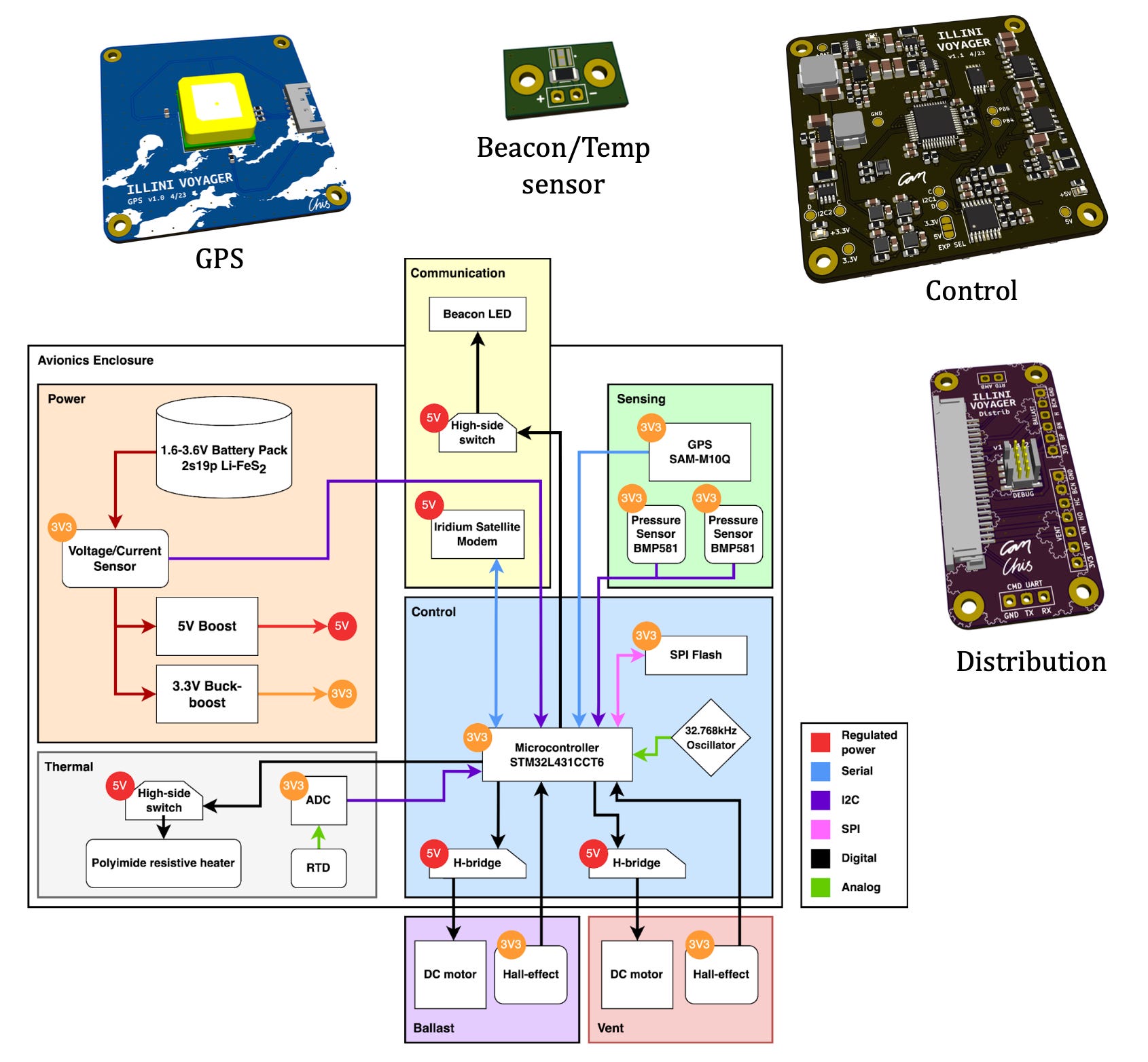
ILLVOY: Avionics
The avionics consisted of an iridium satellite modem, a GPS module, 38 AA batteries, a beacon LED, a main control board, and three other custom PCBs. Through the satellite modem, the balloon receives commands and transmits sensor data back to the ground station (raspberry pi webserver) from nearly any location on the planet. The main control board uses an STM32 microcontroller to manage each device, drive two DC motors, run a heating control loop, and read pressure, temperature, and battery data.
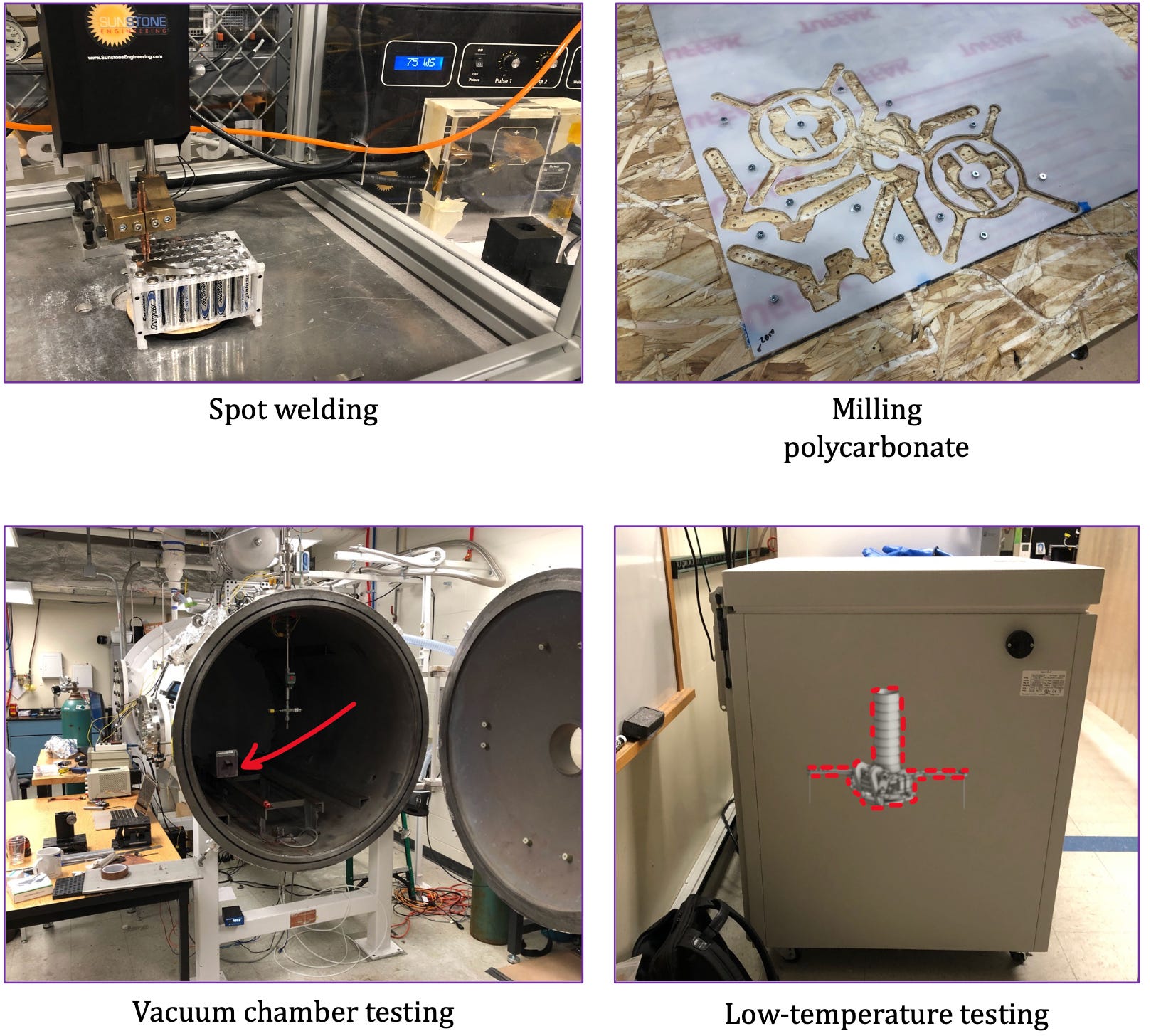
ILLVOY: Manufacturing/testing
The project involved learning new manufacturing skills, including spot welding, creating CAM and operating a 3-axis CNC, polyurethane foam molding, and conformal coating PCBs. We also performed intensive testing with an ultra low temperature freezer at -68oC and a vacuum chamber to verify our electronics and materials for high-altitude conditions.
ILLVOY: Flight
The balloon flew from Champaign, Illinois to Barret, West Virginia, where it was coincidentally recovered by volunteer firefighters. Unfortunately, the vent valve failed to actuate after 13 hours into the flight, cutting the flight short by popping at high altitude. Still, the flight lasted 16.5 hours, up to 8 times longer than conventional weather balloons.